致力于成為國內(nèi)光伏運維領域價值創(chuàng)造的領航者
Committed to be the leader in value creation of the PV operation and maintenance field!




光伏板清掃機器人的設計需要兼顧清潔效率、組件保護、環(huán)境適應性和智能化控制,核心目標是在不損傷光伏板的前提下,高效清除表面污染物。以下從機械結(jié)構(gòu)、驅(qū)動系統(tǒng)、清潔模塊、控制系統(tǒng)、能源供給五個核心維度,詳解光伏板清掃機器人的設計要點。

一、機械結(jié)構(gòu)設計:適配光伏板特性
光伏板通常為傾斜安裝(角度15°-35°)、表面光滑,機械結(jié)構(gòu)需滿足“穩(wěn)定行走+輕量化+防跌落”三大要求:
1. 整體框架
- 材質(zhì)選擇:采用鋁合金(6061型號)或碳纖維復合材料,兼顧強度與輕量化(整機重量≤15kg,避免壓損組件);
- 外形尺寸:寬度略小于光伏板寬度(如標準組件1.6m寬,機器人設計為1.5m寬),長度根據(jù)清潔模塊布局確定(通常0.8-1.2m);
- 防護等級:IP65及以上(防雨水、防塵,適應戶外環(huán)境),關鍵部件(如電機、控制器)需額外密封。
2. 行走機構(gòu)(核心)
需解決“在傾斜光滑表面不打滑、不偏移”的問題,主流方案有兩種:
- 履帶式行走(推薦):
- 履帶材質(zhì):采用高摩擦系數(shù)橡膠(邵氏硬度60-70),表面設計防滑紋路(如菱形花紋),提升抓地力;
- 履帶寬度:8-12cm(增加與光伏板接觸面積),間距與光伏板邊框匹配(避免壓到邊框?qū)е轮匦牟环€(wěn));
- 張緊裝置:配備彈簧張緊機構(gòu),適應光伏板表面微小凸起(如接線盒),避免卡滯。
- 輪式行走(輔助方案):
- 驅(qū)動輪:聚氨酯材質(zhì)(摩擦系數(shù)0.8以上),直徑10-15cm,成對布置(至少4輪,含2個驅(qū)動輪+2個萬向輪);
- 優(yōu)勢:結(jié)構(gòu)簡單、能耗低;劣勢:在潮濕或多塵表面易打滑,適合低傾角(≤15°)光伏板。
3. 防跌落保護
- 邊緣檢測:在機器人前端/兩側(cè)安裝紅外傳感器(檢測距離5-10cm),當識別到光伏板邊緣時,自動停止并反向移動(避免跌落);
- 緊急制動:配備電磁制動器,斷電時自動鎖死行走機構(gòu),防止機器人在傾斜面板上滑動。
二、驅(qū)動系統(tǒng)設計:動力與控制平衡
驅(qū)動系統(tǒng)需滿足“行走平穩(wěn)、調(diào)速精準、動力充足”,適配不同傾角和表面狀況:
1. 驅(qū)動電機選型
- 類型:直流減速電機(帶編碼器,支持速度反饋),功率根據(jù)機器人重量確定(單電機功率50-100W,雙驅(qū)動輪配置總功率100-200W);
- 扭矩:≥5N·m(確保在30°傾角時能帶動機器人爬坡);
- 轉(zhuǎn)速:可調(diào)速(0-30m/min),清潔時低速(10-15m/min,保證清潔效果),移動時高速(20-30m/min,提升效率)。
2. 傳動機構(gòu)
- 采用齒輪減速箱(減速比50:1-100:1)+ 鏈條/同步帶傳動,避免動力損耗;
- 關鍵部位加裝軸承(如驅(qū)動軸),減少摩擦噪音(運行噪音≤60dB,避免擾民)。
3. 差速轉(zhuǎn)向
通過控制兩側(cè)驅(qū)動輪的轉(zhuǎn)速差實現(xiàn)轉(zhuǎn)向(如左側(cè)輪停轉(zhuǎn)、右側(cè)輪轉(zhuǎn),實現(xiàn)原地轉(zhuǎn)向),轉(zhuǎn)彎半徑≤0.5m,適應組件間的狹窄空間。
三、清潔模塊設計:高效去污+組件保護
清潔模塊是核心執(zhí)行部件,需兼顧“清除頑固污漬”和“不損傷光伏板表面”(減反射膜厚度僅幾微米,極易劃傷):
1. 清掃機構(gòu)
- 毛刷選型:
- 材質(zhì):尼龍絲(直徑0.1-0.2mm)或PP絲,柔軟且耐磨,長度5-8cm(確保與面板充分接觸);
- 結(jié)構(gòu):滾刷式(1-2個,直徑10-15cm),沿機器人寬度方向布置,旋轉(zhuǎn)方向與行走方向相反(增強清掃力);
- 轉(zhuǎn)速:300-500r/min(可調(diào),頑固污漬時提高轉(zhuǎn)速)。
- 輔助清潔:
- 前置刮板(硅膠材質(zhì),厚度2-3mm):先刮除大顆粒雜質(zhì)(如樹葉、鳥糞塊),避免劃傷毛刷;
- 后置刮水條(橡膠材質(zhì)):清潔后刮除殘留水分,減少水漬殘留(尤其高溫天氣)。
2. 噴淋系統(tǒng)(可選,針對頑固污漬)
- 水箱容量:5-10L(根據(jù)續(xù)航需求設計,避免過重);
- 噴頭:霧化噴頭(水壓0.1-0.2MPa),沿毛刷兩側(cè)布置,均勻噴灑清水或中性清潔劑(濃度≤0.5%);
- 智能控制:通過圖像識別判斷污漬類型,自動啟停噴淋(如檢測到鳥糞時開啟,普通灰塵僅用干刷)。
四、控制系統(tǒng)設計:智能化與可靠性
控制系統(tǒng)是機器人的“大腦”,需實現(xiàn)“自主導航、清潔策略優(yōu)化、狀態(tài)監(jiān)控”等功能:
1. 核心控制器
- 采用STM32系列單片機(如STM32F407)或工業(yè)級PLC,支持多傳感器數(shù)據(jù)處理和電機控制;
- 通信模塊:4G/LoRa(遠程控制)+ 藍牙(近距離調(diào)試),可接入光伏電站云平臺。
2. 傳感器配置
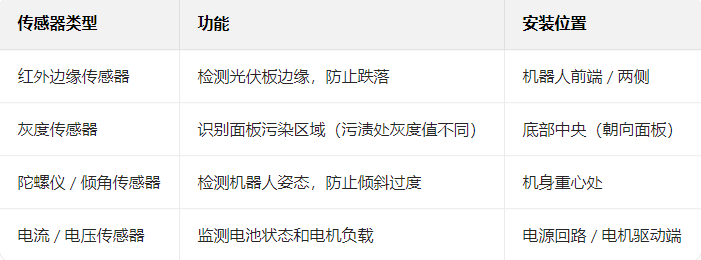
3. 智能控制策略
- 自主路徑規(guī)劃:通過灰度傳感器識別面板邊界,自動規(guī)劃“Z字形”或“往復式”清潔路徑,覆蓋率≥99%;
- 自適應清潔:根據(jù)污染程度(灰度值分析)調(diào)整毛刷轉(zhuǎn)速和行走速度(污染嚴重時降速+提高轉(zhuǎn)速);
- 遠程運維:支持手機APP/電腦端查看清潔進度、電池電量、故障報警(如毛刷磨損、傳感器故障),可遠程啟動/停止任務。
五、能源供給設計:續(xù)航與充電平衡
光伏板清掃機器人需獨立供電,能源設計需兼顧“續(xù)航時間”和“充電便利性”:
1. 電池選型
- 采用鋰電池組(如12V/24V,容量50-100Ah),能量密度≥150Wh/kg,循環(huán)壽命≥1000次;
- 續(xù)航要求:單次充電可清潔500-1000㎡(約4-8小時,滿足單日清潔需求)。
2. 充電方式
- 自動充電:在光伏陣列邊緣設置充電基站,機器人完成任務后自動返回基站充電(通過RFID或紅外定位);
- 光伏輔助充電:機身頂部安裝小型光伏板(功率10-20W),在光照充足時補充電量,延長續(xù)航。
3. 低電量保護
- 電池電量≤20%時,自動停止清潔任務,啟動返回充電程序;
- 配備過充、過放、短路保護電路,避免電池損壞。
六、典型設計案例:無軌式光伏清掃機器人
以適配屋頂分布式電站的無軌機器人為例,核心參數(shù)參考:
- 尺寸:1500mm(寬)×800mm(長)×300mm(高),重量12kg;
- 行走:雙履帶驅(qū)動,速度0-20m/min,更大爬坡角度35°;
- 清潔:1個滾刷(尼龍材質(zhì))+ 硅膠刮水條,支持干刷/噴淋模式;
- 續(xù)航:24V/60Ah鋰電池,單次清潔600㎡,充電時間3小時;
- 智能功能:APP遠程控制、自動避障、污染識別、低電量自動返航。
設計注意事項
1. 組件保護優(yōu)先:所有與光伏板接觸的部件(毛刷、刮板、履帶)必須采用柔軟材質(zhì),避免金屬件直接接觸;
2. 環(huán)境適應性:北方地區(qū)需考慮低溫啟動(-20℃至50℃工作溫度),沿海地區(qū)需做防鹽霧處理;
3. 成本控制:核心部件(電機、控制器)選用工業(yè)級產(chǎn)品,非核心部件(如外殼)可采用注塑件降低成本;
4. 標準化接口:預留傳感器擴展接口(如后期加裝熱成像儀檢測組件故障),便于功能升級。
通過上述設計,光伏板清掃機器人可實現(xiàn)“無人值守、按需清潔、高效安全”的運維目標,尤其適合中大型光伏電站規(guī)模化應用,大幅降低人工成本并提升清潔效果。
辦公總機:0371-56850886
公司傳真:0371-56850887
營銷專線:15838231263
企業(yè)合作:17698011086
企業(yè)郵箱:drzn@zzdrzn.com
經(jīng)營地址:鄭州市航經(jīng)開第六大街創(chuàng)新大廈
聯(lián)系我們
以人為本,眾志成城
以“用戶至上”.“服務第一”為原則
追求產(chǎn)品和服務高質(zhì)量,努力實現(xiàn)與客戶之間真誠有效的溝通
不斷地圓夢、奔跑與騰飛
